Industry Category
Companies are invited to participate in this category of Minesweepers competition and demonstrate their state-of-the-art solutions and technologies in the area of humanitarian demining. In this category, each participating team will have to perform the following actions:
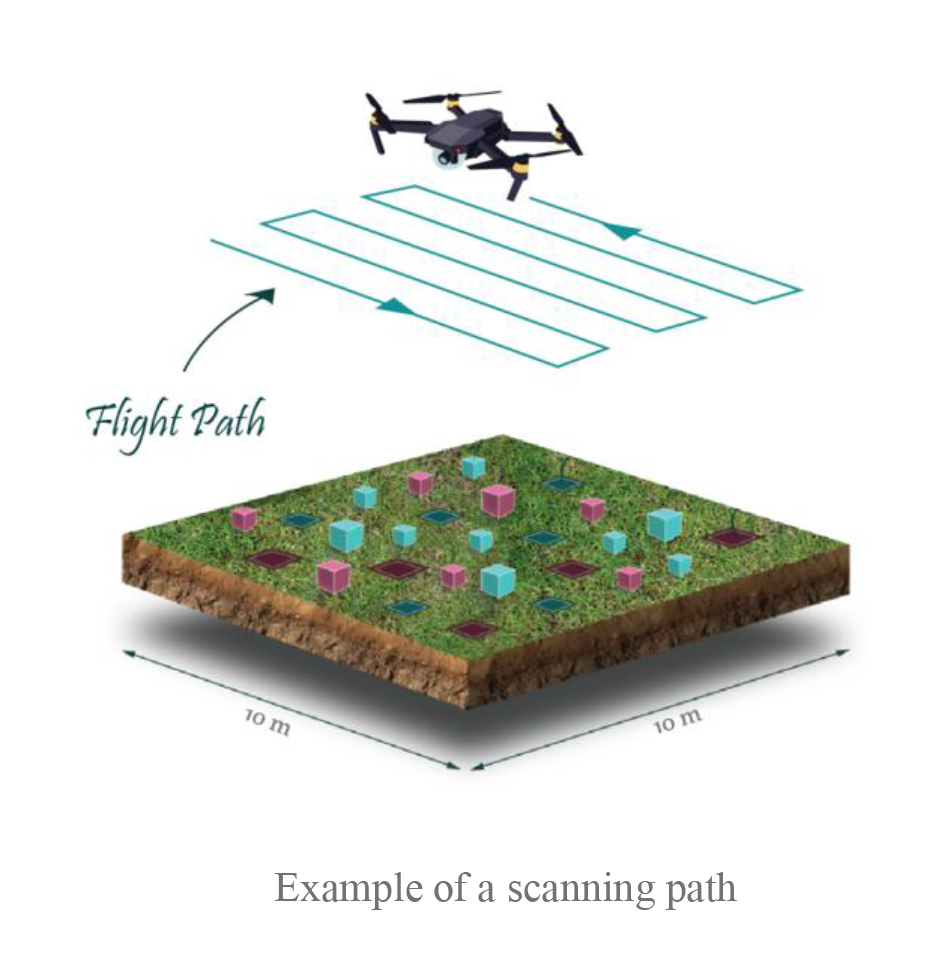
- Search for surface-laid and buried metallic and minimum metal objects of different dimensions and shapes using teleoperated or an autonomous ground/aerial vehicle. These objects mimic the anti-personnel landmines and unexploded ordnances.
- Automatically produce a high-precision map for the locations of the detected objects without human intervention.
- Identifying the types of the detected landmines.
- Collecting and moving the detected surface landmines to a built-in container or to a designated area outside the competition arena using a teleoperated or autonomous grasping mechanism.
Minefield
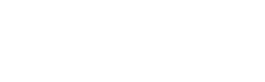
The competition arena will be a fenced indoor arena with a size of 10m x 10m with maximum height 4m. The arena is a simulated rough terrain with some steep inclines and some trees as obstacles. The arena is protected by a safety netting as the use of drones is allowed in Minesweepers competition. The following figure illustrated the competition arena. It will be have Buried Mines: these mines are made from metallic and non-metallic materials with different shapes and dimensions up to 10*10*10 cm3 (L*W*D), they are completely buried underground with maximum depth 5cm, which simulate the AP land mines such as German S-mine, Russian PMN and British Mk 2. Surface Mines: these objects are similar to the buried objects described in shape and dimensions and are used to simulate the UXOs.
Academia Category
In this category, the following tasks are to be performed by the participating teams:
- Search for surface-laid and buried metallic objects of a cubical shapes using teleoperated or an autonomous ground/aerial vehicle. These objects mimic the anti-personnel landmines and unexploded ordnances.
- Automatically produce a high-precision map for the locations of the detected objects without human intervention.
- Collecting and moving the detected surface landmines to a built-in container or to a designated area outside the competition arena using a teleoperated or autonomous grasping mechanism.
Minefield
The competition arena will be a fenced indoor arena with a size of 10m x 10m with maximum height 4m. The arena is a simulated rough terrain with some steep inclines and some trees as obstacles. The arena is protected by a safety netting as the use of drones is allowed in Minesweepers competition. The following figure illustrated the competition arena. It will have Buried Mines: these mines are made from metallic cubes, with approximate dimensions of 10x10x10 cm3 (L*W*D). These mines are completely buried underground with maximum depth 5 cm. Surface Mines: these objects are similar to the buried objects described with approximate dimensions of 5x5x5 cm3 (L*W*D).

Junior Category
In this category, the following tasks are to be performed by the participating teams:
- Search for surface-laid and buried metallic objects of a cubical shapes using teleoperated or an autonomous ground/aerial vehicle.
- Collecting and moving the detected surface landmines to a built-in container or to a designated area outside the competition arena using a teleoperated or autonomous grasping mechanism.
Minefield
The competition arena will be a fenced indoor arena with a size of 10m x 10m with maximum height 4m. The arena is a simulated rough terrain with some steep inclines and some trees as obstacles. The arena is protected by a safety netting as the use of drones is allowed in Minesweepers competition. The following figure illustrated the competition arena. It will have Buried Mines: these mines are made from metallic cubes, with approximate dimensions of 10x10x10 cm3 (L*W*D). These mines are completely buried underground with maximum depth 5 cm. Surface Mines: these objects are similar to the buried objects described with approximate dimensions of 5x5x5 cm3 (L*W*D).
ROS
Robot Operating System (ROS)
The obtained score will be multiplied by 1.2 in case of the use of Robot Operating System (ROS) as main robot middleware. ROS is an open source platform that provides a set of software libraries and tools to help you build robot applications. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. Building the robot based on ROS allows you to make use of interesting software module and the high fidelity simulator developed by the participants of the different editions of Humanitarian Robotics and Automation Technology Challenge (HRATC) organized by IEEE Robotics & Automation Society – Special Interest Group on Humanitarian Technology (RAS–SIGHT). Minesweepers is also organized under the auspices of IEEE RAS SIGHT
Multi-Robot Systems (MRS)
Multi-robot systems (MRS) are a group of robots that are designed aiming to perform some collective behavior. By this collective behavior, some goals that are impossible for a single robot to achieve become feasible and attainable. There are various foreseen benefits of MRS compared to single robot systems. These benefits include, but are not limited to the following:
- Resolving task complexity.
- Increasing the performance.
- Increasing reliability.
- Simplicity in design.
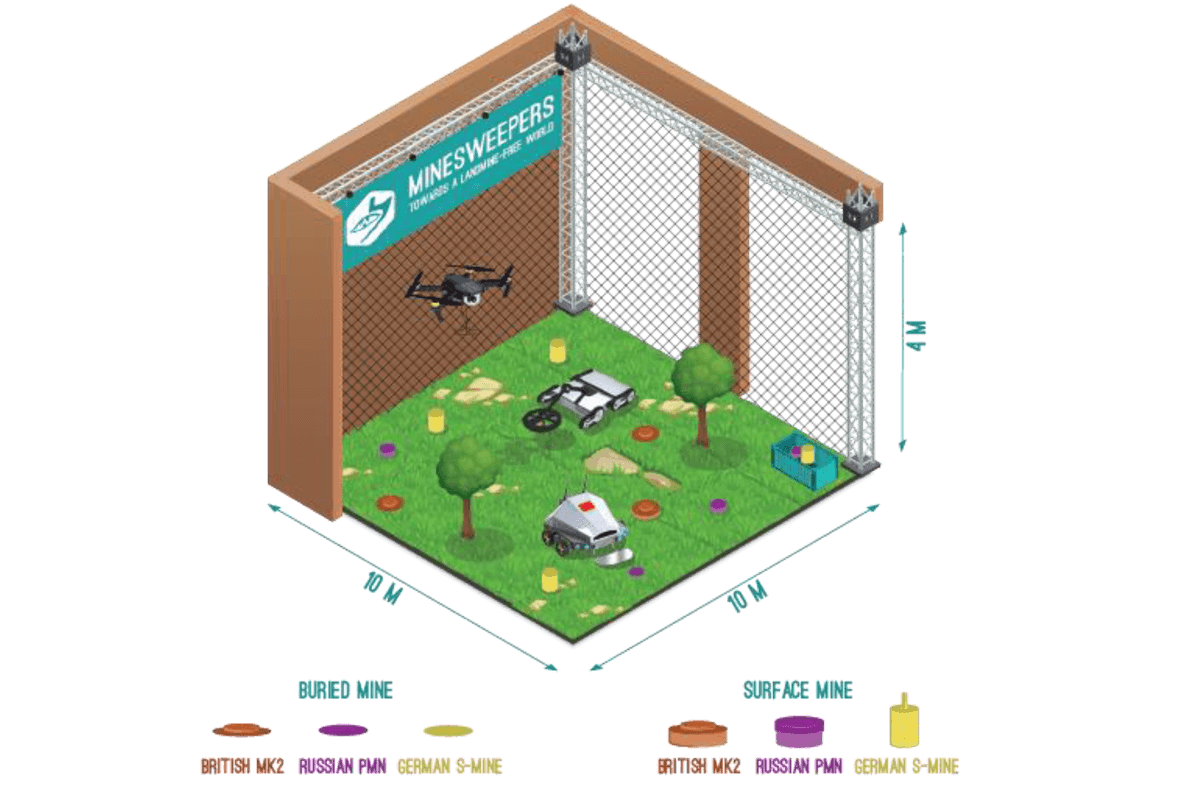
Teleoperated vehicles play the role of human deminers while an autonomous vehicle is used to mimic the supervisor/team leader’s role. The team leader has to be equipped with a gripper or a marking mechanism to mark the location of the landmine detected by the deminers. More than one deminer can be integrated into the team but only one supervisor or team leader is allowed. If two deminers are used, these unmanned vehicles “A” and “B” are assigned to each lane as shown in the figure. Vehicle “B” starts to work after vehicle “A”. If a deminer detected a surface-laid or a buried mine in its assigned lane, it has to produce a warning siren and inform the team leader about the position of the detected mine. All the deminers have to stop and wait while the autonomous vehicle (the team leader) comes forward marks the detected mine with a red mark or flag and the scanning procedure continues until the entire arena is scanned.
If the team participate with using multi-robots system, the competition mission will be as mentioned before and not depending on the category, it belongs to it.
1.2 will be multiplied to the whole score.
UAVs/ Drones
UAVs/ Drones are allowed to be used in the competition to do the same tasks like the teleoperated or autonomous robots in all categories but if the team uses UAV, it will have 20% bonus score additional to the main missions score. The maximum height of the arena is 4m as illustrated below.